Andreas.
Physicist turned software engineer.
I work with C++ and Python on automotive projects, with a passion for algorithms, complex systems, and open-source contributions in C++, Python, and Go.
I work with C++ and Python on automotive projects, with a passion for algorithms, complex systems, and open-source contributions in C++, Python, and Go.

I’m a software engineer with a background in theoretical physics, working primarily in automotive software development. Over roughly ten years, my work has included C++ development for sensor-related systems (camera, LiDAR, radar), Python-based sensor data analysis, and the development and maintenance of automotive-safe C++ core libraries.
I also contribute to open-source codebases, particularly in the area of graph algorithms and performance optimization. This work usually involves algorithm implementation, performance-focused refactoring, and the addition of tests and benchmarks, with contributions merged into established projects.
I’m interested in algorithms and data structures, and in understanding their performance through profiling and reproducible benchmarks. Alongside my core work, I’m gradually expanding my exposure to Go-based projects, build systems, and containerized workflows to broaden my perspective on large-scale and distributed software.
Technologies and areas I actively work with include:
Modern C++ (performance-critical systems, algorithms)
Python (scientific computing, tooling, bindings)
Graph algorithms and network analysis
Go (learning, selected open-source contributions)
CMake (regular use)
Bazel, Docker (introductory / exploratory)
Product Ownership & Leadership
Hands-on Engineering
Development of an automotive header-only C++ library
C++
Python
Leadership
Task force support: Refactored GPS-Based Route Prediction Component
C++
Python
Developed and maintained C++ modules for camera image and metadata processing to support labeling and training workflows.
Administered an Azure-hosted SQL database for image metadata and label storage, ensuring reliable data access and schema evolution.
Integrated Azure DevOps and Azure ML pipelines to automate label data deliveries and schema updates.
Expanded Azure ML pipelines and SQL-based workflows to improve data handling, scalability, and pipeline functionality.
Developed a deep-learning–based prototype for LiDAR blockage detection in Python, achieving ~90% detection probability in staged pollution scenarios.
Performed in-depth analysis of LiDAR sensor performance under diverse contamination scenarios, identifying key factors affecting accuracy and reliability.
Engineered and extended a Python preprocessing framework for point cloud data, supporting multiple LiDAR types (multi-return, intensity, and other features) to streamline training data generation and augmentation.
Created accurate LiDAR sensor models to enable comprehensive sensor-set evaluations.
Leadership
Projects
Leadership
Postdoctoral Researcher in Theoretical High Energy Particle Physics
Selected feature contributions
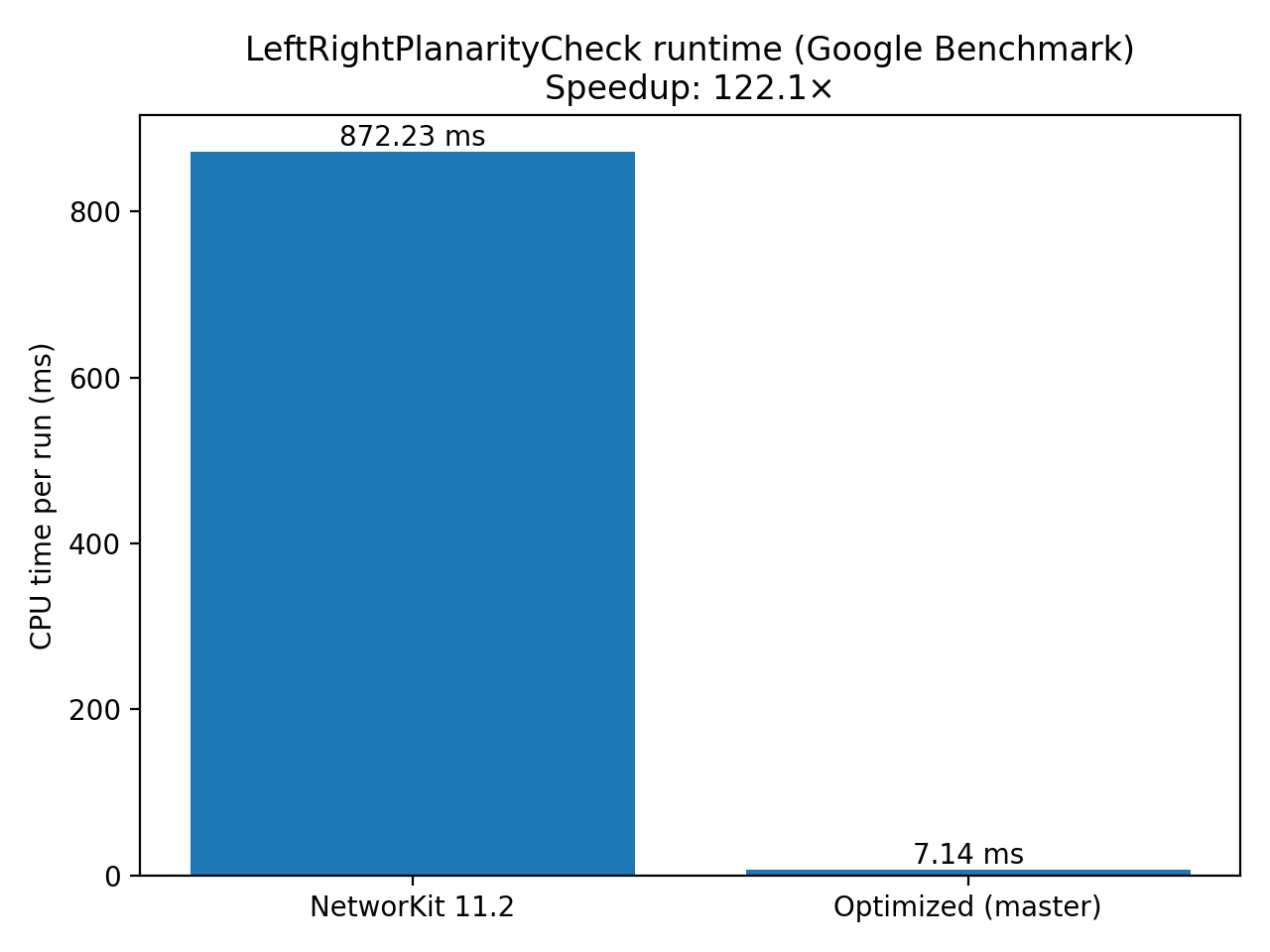
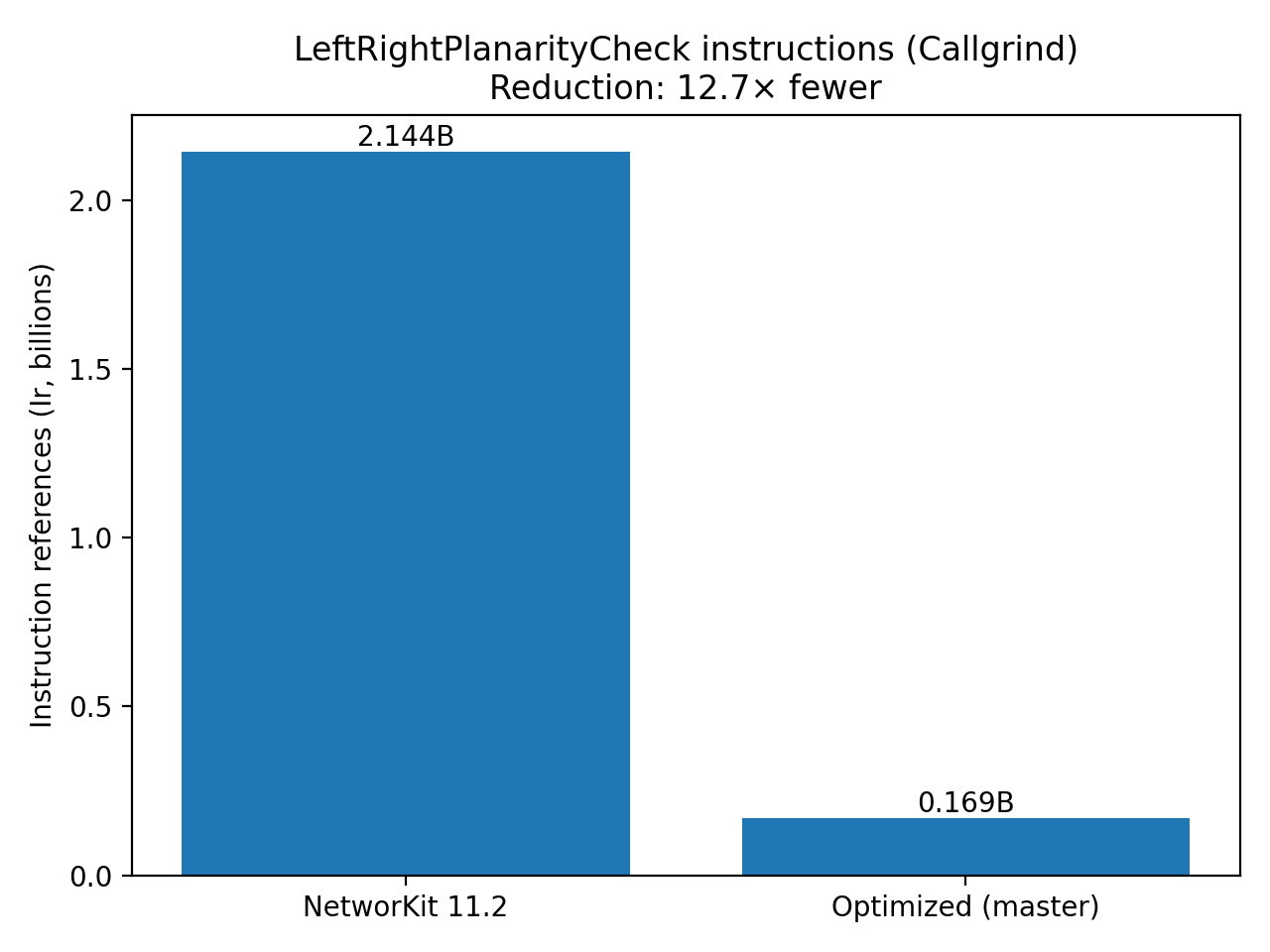
Left–Right Planarity Test
Near-linear-time planarity check based on the Left–Right algorithm; full C++ implementation with extensive tests.
• Initial implementation: PR #1276
• Performance rewrite: ≈100× faster isolated runtime (Google Benchmark) and up to ≈20× faster planarity test-suite: PR #1377
Floyd–Warshall with OpenMP parallelization
All-pairs shortest paths with shared-memory parallelism; performance study on bit-level containers.
~40% fewer dynamic instructions using std::vector<uint8_t> instead of std::vector<bool>.
PR #1312
Successive Shortest Path (min-cost flow)
Computes minimum-cost flows under capacities and supplies/demands.
PR #1349
Maintenance & ecosystem work
Ongoing features, bug fixes, code-quality improvements, Python bindings, and developer tooling.
Merged PRs
Selected algorithmic & numerical contributions
DuckDB (C++ & Python)
• Resolved a segmentation fault in the DuckDB core overwrite path, backported to the
v1.4-andium release branch; added a targeted regression test:
PR #20468
• Fixed a memory leak in the DuckDB Python bindings by correcting object lifetime handling;
added regression coverage:
PR #245
• Removed hundreds of unused headers across the DuckDB core and storage layers, improving
compile-time dependency hygiene and long-term maintainability:
PR #18422,
PR #20407
• Fixed incorrect SQL identifier quoting in the Python API’s
select_dtypes projection path, preventing query binder errors for quoted columns:
PR #242
NetworkX (Python)
Bug fixes and correctness improvements in graph algorithms.
Merged PRs
TiDB (Go)
Exploratory contribution to a distributed SQL database; initial PR under review.
In progress